








للأخير منذ عام ونصف، تجولت سيارتان سيدان من طراز Tesla Model 3 بيضاء اللون محملة بخمس كاميرات إضافية وكمبيوتر عملاق بحجم كف اليد بهدوء حول سان فرانسيسكو. في مدينة وعصر يعج بالأسئلة حول قدرات الذكاء الاصطناعي وحدوده، تحاول الشركة الناشئة التي تقف وراء سيارات تيسلا المعدلة الإجابة على سؤال بسيط: ما مدى السرعة التي يمكن بها لشركة ما بناء برمجيات المركبات ذاتية القيادة اليوم؟
الشركة الناشئة، التي تعلن أنشطتها للعامة لأول مرة اليوم، تسمى HyprLabs. وينقسم فريقها المكون من 17 شخصًا (ثمانية منهم فقط بدوام كامل) بين باريس وسان فرانسيسكو، ويدير الشركة تيم كينتلي كلاي، أحد مؤسسي شركة Zoox، والذي خرج فجأة من الشركة المملوكة الآن لشركة أمازون في عام 2018. وقد حصلت Hypr على تمويل قليل نسبيًا، 5.5 مليون دولار منذ عام 2022، لكن طموحاتها واسعة النطاق. وفي نهاية المطاف، تخطط لبناء وتشغيل الروبوتات الخاصة بها. يقول كينتلي كلاي: “فكر في الطفل المحبوب لـ R2-D2 وSonic the Hedgehog”. “سوف تحدد فئة جديدة غير موجودة حاليًا.”
وفي الوقت الحالي، تعلن الشركة الناشئة عن منتجها البرمجي المسمى Hyprdrive، والذي تعتبره بمثابة قفزة إلى الأمام في كيفية تدريب المهندسين للمركبات على قيادة نفسها. هذه الأنواع من القفزات موجودة في جميع أنحاء مجال الروبوتات، وذلك بفضل التقدم في التعلم الآلي الذي يعد بخفض تكلفة تدريب برمجيات المركبات ذاتية القيادة، وحجم العمالة البشرية المعنية. وقد جلب هذا التطور في التدريب حركة جديدة إلى الفضاء الذي عانى لسنوات من “حوض خيبة الأمل”، حيث فشل صانعو التكنولوجيا في الوفاء بالمواعيد النهائية الخاصة بهم لتشغيل الروبوتات في الأماكن العامة. أما الآن، فتقوم سيارات الأجرة بنقل الركاب الذين يدفعون أجورهم في المزيد والمزيد من المدن، وتقدم شركات صناعة السيارات وعودًا طموحة جديدة بشأن جلب القيادة الذاتية إلى السيارات الشخصية للعملاء.
لكن استخدام فريق صغير وسريع الحركة ورخيص الثمن للانتقال من “القيادة بشكل جيد” إلى “القيادة بأمان أكبر بكثير من الإنسان” يمثل عقبة طويلة في حد ذاته. تقول كنتلي كلاي: “لا أستطيع أن أقول لك، بكل صدق، إن هذا سينجح”. “لكن ما قمنا ببنائه هو إشارة قوية حقًا. إنها تحتاج فقط إلى الارتقاء بها.”
التكنولوجيا القديمة، والحيل الجديدة
تعد تقنية التدريب على البرمجيات الخاصة بـ HyprLabs خروجًا عن أساليب الشركات الناشئة الأخرى في مجال الروبوتات لتعليم أنظمتها كيفية قيادة نفسها.
أولاً، بعض المعلومات الأساسية: لسنوات عديدة، بدا أن المعركة الكبيرة في المركبات ذاتية القيادة كانت بين أولئك الذين استخدموا الكاميرات فقط لتدريب برامجهم – تسلا! – وأولئك الذين اعتمدوا على أجهزة استشعار أخرى أيضًا – وايمو وكروز! – بما في ذلك أجهزة الاستشعار والرادار التي كانت باهظة الثمن في السابق. ولكن تحت السطح، ظهرت اختلافات فلسفية أكبر.
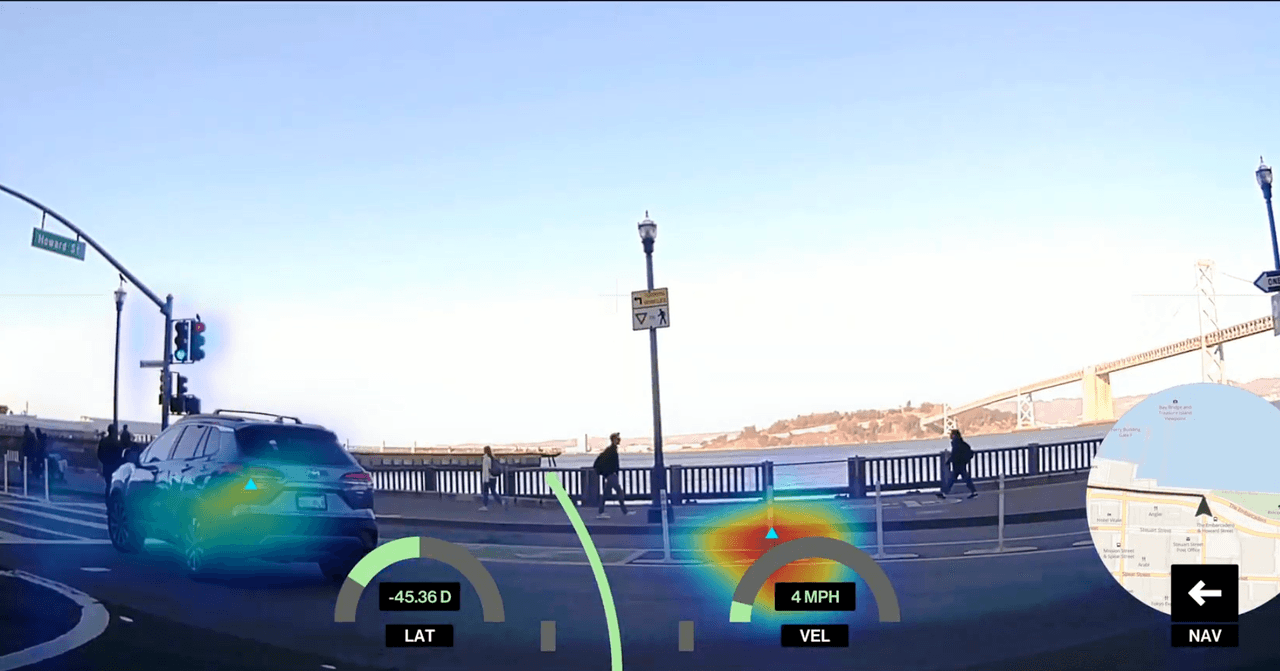
أراد أتباع الكاميرا فقط مثل تسلا توفير المال أثناء التخطيط لإطلاق أسطول ضخم من الروبوتات؛ على مدى عقد من الزمن، كانت خطة الرئيس التنفيذي إيلون موسك هي تحويل جميع سيارات عملائه فجأة إلى سيارات ذاتية القيادة من خلال تحديث البرنامج. وكان الجانب الإيجابي هو أن هذه الشركات كان لديها الكثير والكثير من البيانات، حيث قامت سياراتها التي لم تكن ذاتية القيادة بعد بجمع الصور أينما قادت السيارة. تم إدخال هذه المعلومات في ما يسمى بنموذج التعلم الآلي “الشامل” من خلال التعزيز. يلتقط النظام الصور —دراجة-ويُصدر أوامر القيادة-حرك عجلة القيادة إلى اليسار وخفف من السرعة لتجنب الاصطدام بها. يقول فيليب كوبمان، الباحث في برمجيات المركبات ذاتية القيادة والسلامة في جامعة كارنيجي ميلون: “الأمر أشبه بتدريب كلب”. “في النهاية، تقول: “كلب سيء” أو “كلب جيد”.”


")



